Suppose we have designed a mount for a camera to be placed on the robot. We likely need to obtain the transform between the camera and the robot, so images obtained from the camera can be transformed into information the robot can act upon. One method is to use the mount design, to compute the translation and rotation of the camera. However, 3D printing is often imperfect, and can result in inaccurate calibration. What’s a simple, empirical method of obtaining a transform?
One way is to use AprilTag, a visual fiducial system that can be used for a multitude of tasks including AR and camera caliberation. These tags resemble QR codes, and their visually distinctive features and small payload allow for accurate and fast localization.
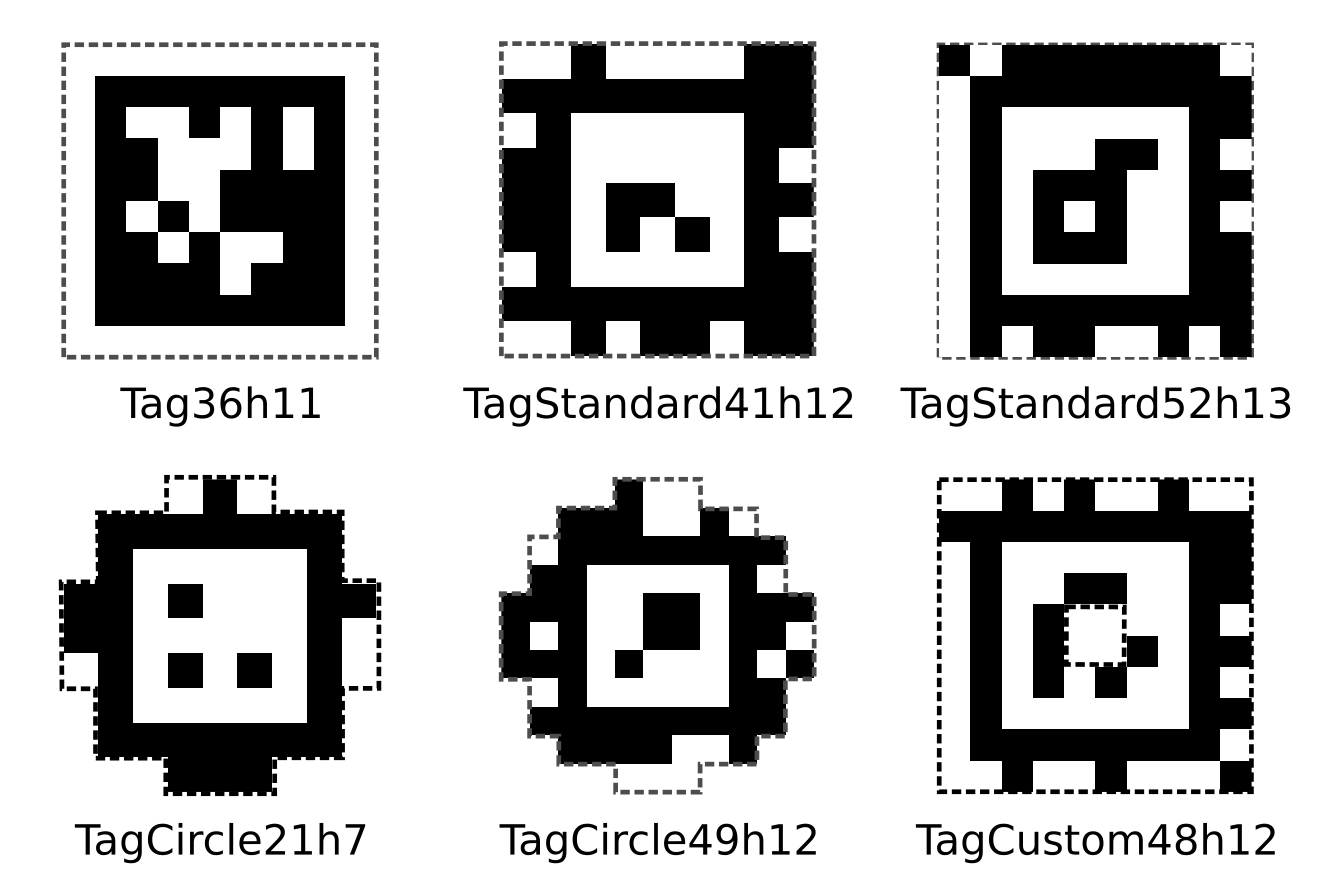
Figure 1: AprilTag’s fiducials. They look a lot like QR codes.
In our setup, we wish to compute the transform between an Intel Realsense camera, and a link on our Robotiq gripper.
First, we print one of these fiducials(instructions here). Here, I printed the
TagStandard41h12 tag with ID 494, of size 8cm. I then placed it at a known
location within the scene. For me, it is simply at a x-displacement of 0.143m
from the robot base link.
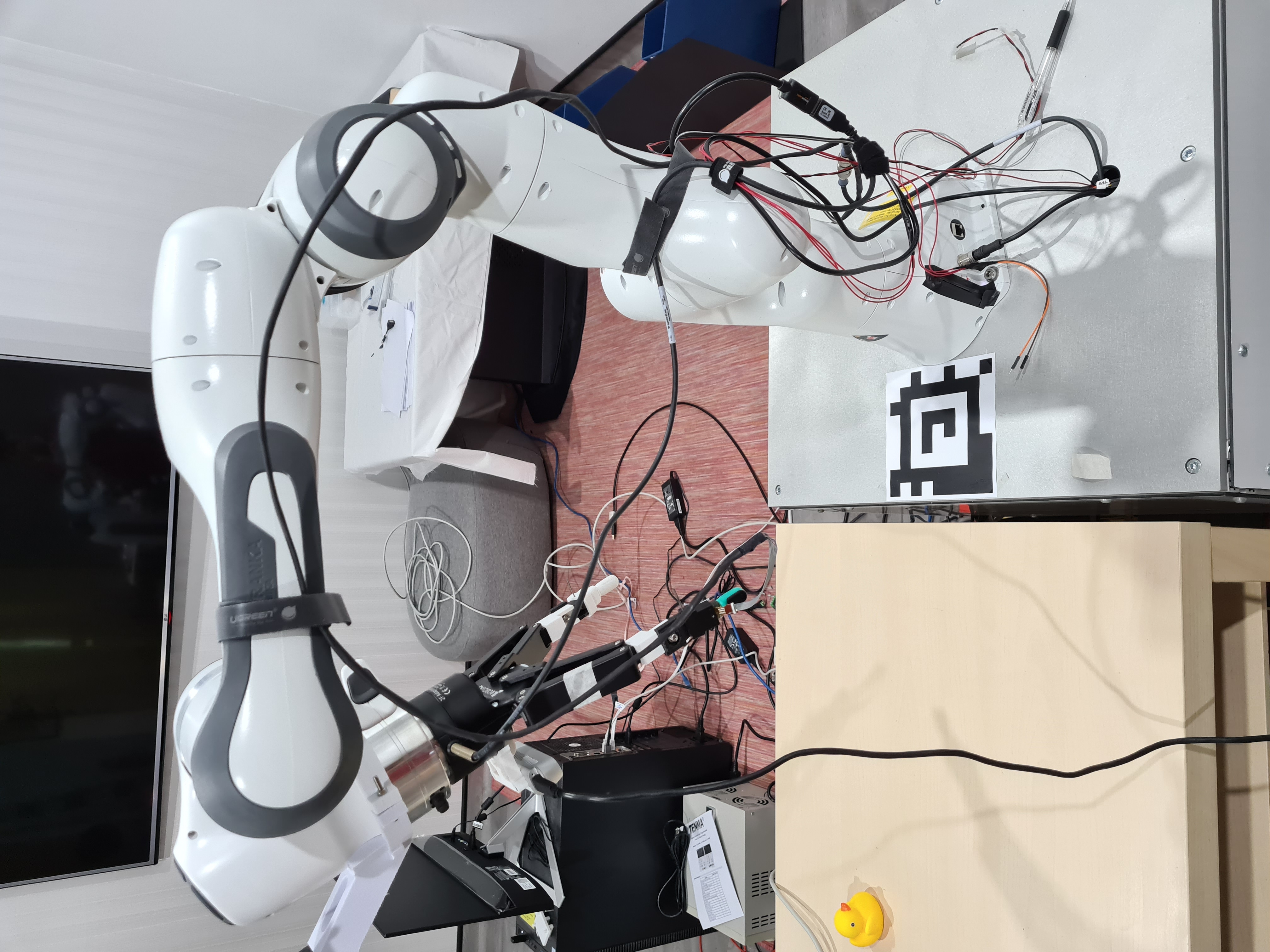
Figure 2: The calibration setup. The fiducial is placed in a known location, visible from the camera.
We adjust the camera such that the camera is able to see the fiducial.
First, we publish the known transform:
rosrun tf static_transform_publisher -0.140 0 0 at494 world 1000
Then, we clone and configure apriltag_ros, changing the settings for our
fiducial. We set tag_family in settings.yml to tagStandard41h12, and setup
the fiducial in tags.yml:
standalone_tags:
[
{ id:494, size: 0.08, name: "at494" }
]
Next, we start the camera stream using the Intel Realsense ROS wrapper:
roslaunch realsense2_camera rs_camera.launch
Finally, we start the AprilTag detection node, reading RGB images from the camera stream, and continuously publishing the transforms:
roslaunch apriltag_ros continuous_detection.launch \
publish_tfs:=true \ # So the transforms are published
camera_frame:=camera_color_optical_frame \ # This is the frame in which the camera images are produced
camera_name:=/camera/color \ # The name of our camera (to get camera info)
image_topic:=image_raw # Here we use image_raw, typically we use image_rect but we're lazy
We should see that AprilTag is able to detect our fiducial, and that the transforms are being published:
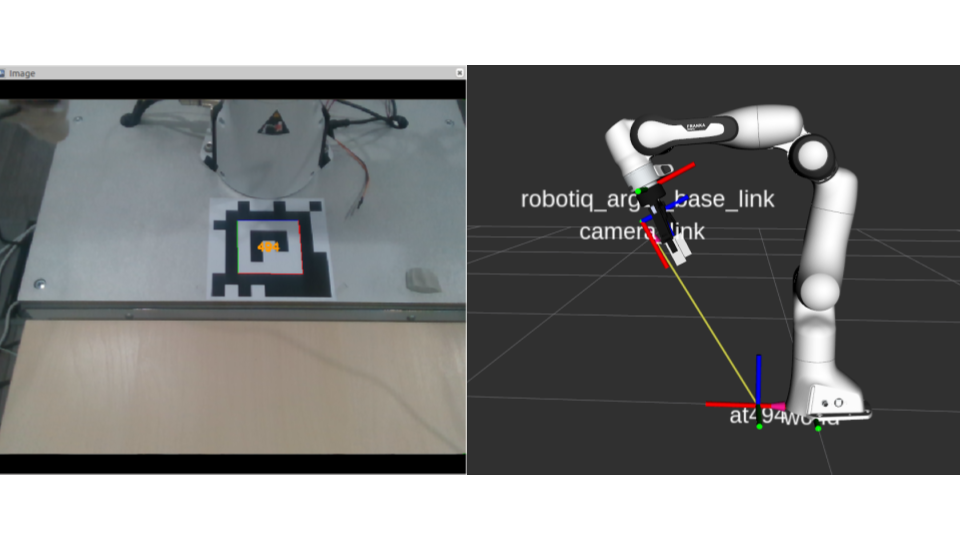
Figure 3: Left: The AprilTag detection system detecting the fiducial. Right: the published TF transforms
Now that we know the transform between the camera and the fiducial, and there is a known transform between the fiducial and the robot, we can now compute the transform between the camera and some fixed link (e.g. the base link of the gripper we are using):
rosrun tf tf_echo camera_link robotiq_arg2f_base_link
At time 1603444940.190
- Translation: [-0.069, -0.015, 0.057]
- Rotation: in Quaternion [0.712, -0.004, 0.702, -0.010]
in RPY (radian) [-2.163, -1.548, -0.970]
in RPY (degree) [-123.957, -88.668, -55.549]
We can now use this transform via a static_transform_publisher for our robotic
tasks. These computed transforms should be double checked against its
theoretical values for accuracy.